Getting started
COMPAS RRC provides an easy-to-use API to operate robots.
The system relies on 3 components: this library, a ROS RRC driver and
a vendor-specific RRC driver running on the robot controller.
A typical deployment of RRC uses Docker to simplify the setup:
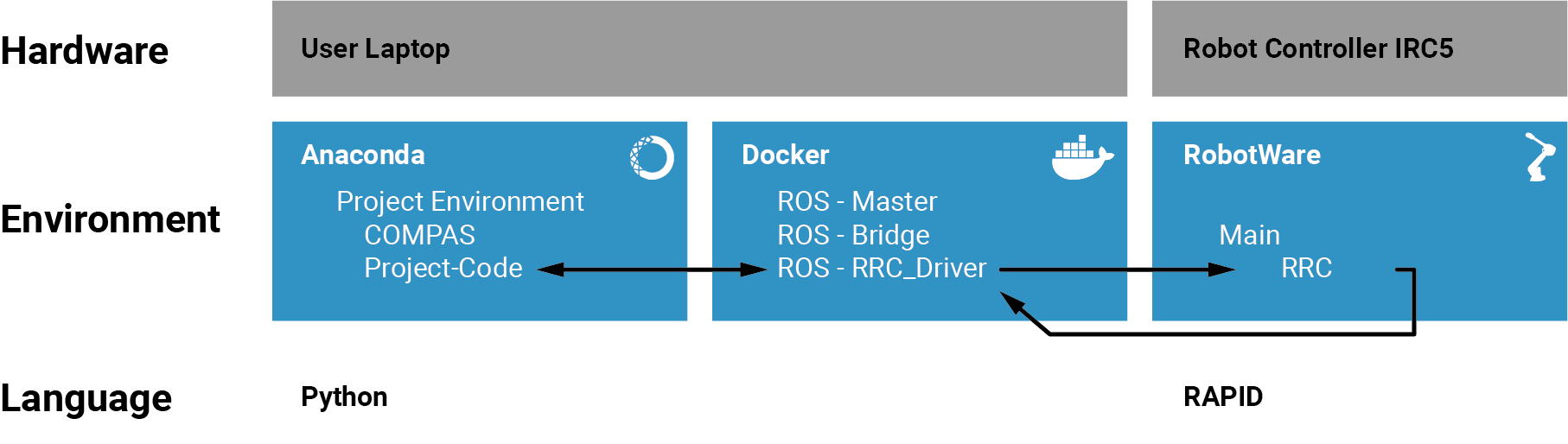
For more details, check the RRC start repository.
Hello World
import compas_rrc as rrc
ros = rrc.RosClient()
ros.run()
abb = rrc.AbbClient(ros, '/rob1')
print('Connected.')
abb.send_and_wait(rrc.PrintText('Welcome to COMPAS_RRC'))
ros.close()